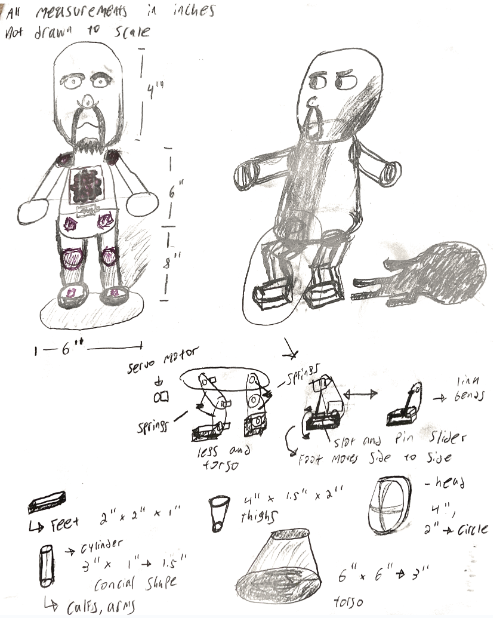
Inital Sketches
These were the inital sketchs of how the robot was intended to look. It is based off of the boxer from Wii Sports.
Create a BiPedal Robot that can walk, throw punches, and speak. This project is still a work in progress.
These were the inital sketchs of how the robot was intended to look. It is based off of the boxer from Wii Sports.
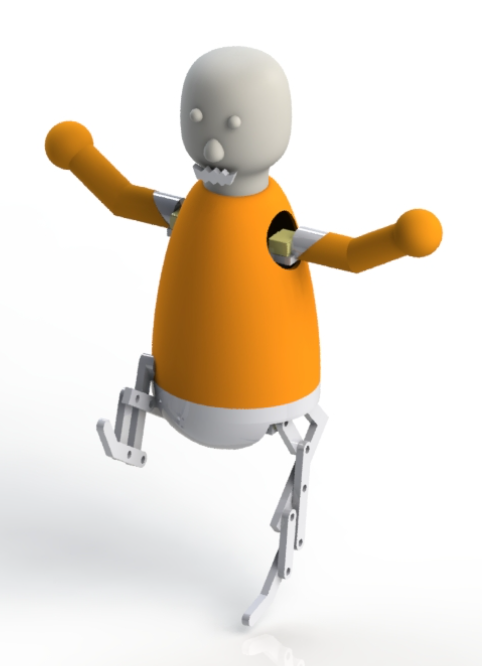
This was the first iteration of the CAD model of this project. It does not include all of the components just the general shape and size of the robot.
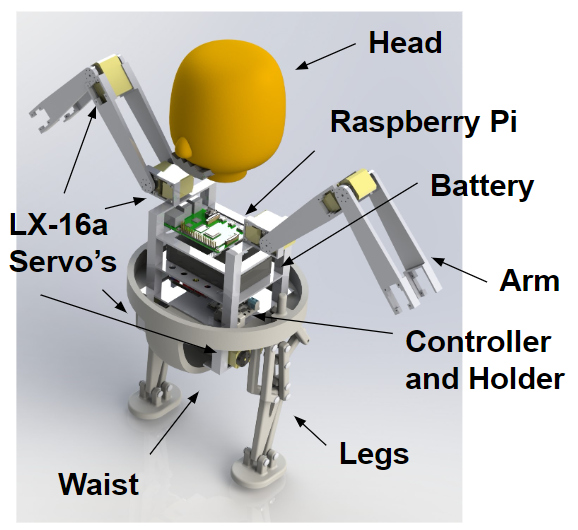
Here you can see each of the individual components of the robot. The Raspberry Pi, DC to DC converter, servo motors, battery, and PLA parts are included.
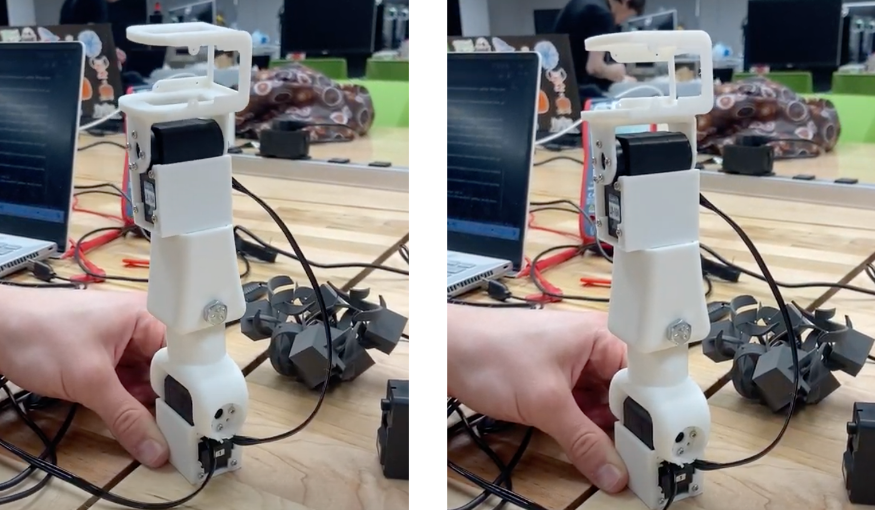
This photo shows the first test we ran to get our servo motors working. It doesn't look strictly like a leg, because we were testing various designs to see which could hold the servo motors the best.
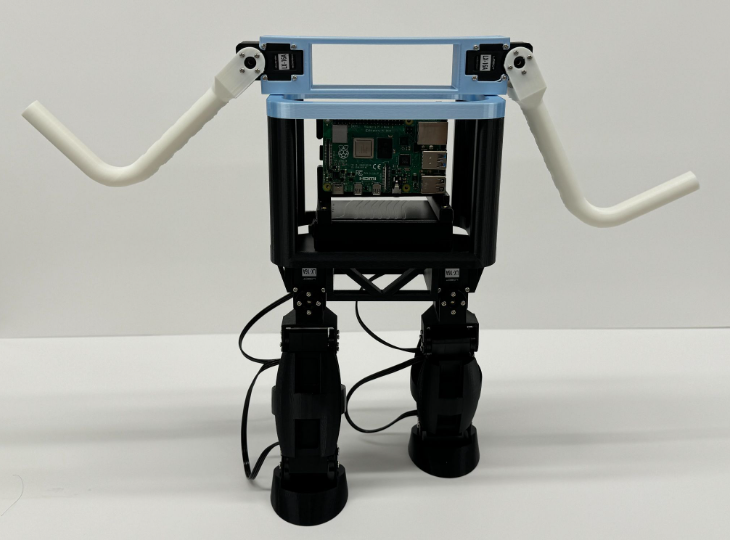
This was the first fully built version of our robot. It did not have the punching feature yet, but it had all the parts neccessary to walk.

This is a photo of one of the intermediate positions for our walking robot. Here is an accompaning video for the walking of the robot:
![]()
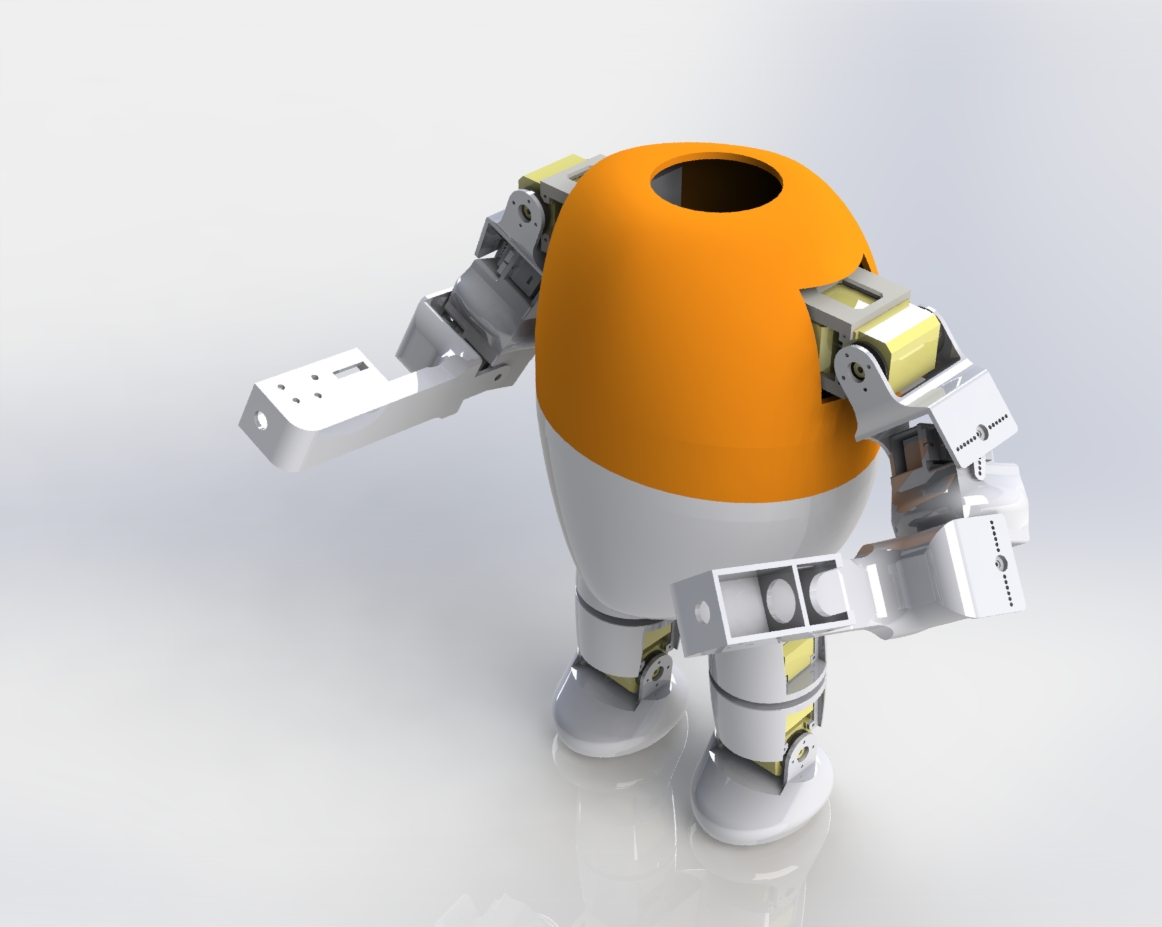
This is the final CAD model for this project. It has 10 servo motors, 2 solenoids, and a Raspberry Pi as the brains of the project. It has not been printed yet.
The reason the above CAD has not been printed is because the model needs to learn to walk, as guess and check would be tedious. So, I imported the model into a software called PyBullet, which uses a URDF file of the robot to simulate it in a flat environment. The GIF shown here is a random sort trying to find the combination of parameters for the robots servo motors that allow it to walk the farthest without falling over. A better method of doing this would be to write a Reinforcement Learning Algorthim but that is still in the works.